
Introduction — a field test story
Last week I was at a site demo and our prototype cut out mid-run — very shiok until it wasn’t. The motor controller had been the quiet hero in our lab, but in real-world stress it showed its true face (you know how that goes lah). Data from similar field trials suggests nearly half of unexpected stops link back to control or sensing issues — not just hardware. So where does that leave teams who thought the problem was solved? I want to unpack that with you now, and point to practical pitfalls we tend to miss before the next roll-out.

Deep dive: why traditional fixes fall short
When teams look for quick wins they often grab a ready-made option — even motor control solutions that promise fast integration. On paper they check boxes. In practice, though, the same old gaps keep showing up: poor handling of torque ripple, imprecise sensor fusion with Hall-effect sensors, and control loops tuned only for ideal conditions. I’ve seen vector control tuned for a bench test fail spectacularly on uneven loads. These are not exotic failures; they are the everyday ones that erode reliability and reputation.
Why do common fixes miss the mark?
Most fixes target symptoms. Teams add a bigger power converter, raise sampling rates, or switch to a higher-end DSP chip. That helps, but it doesn’t cure hidden mismatches between control algorithms and field disturbances. Look, it’s simpler than you think — if you map the real usage patterns first, many “upgrades” become unnecessary. Also, integration issues with edge computing nodes and legacy firmware bite back over time — maintenance becomes costly and unpredictable. — funny how that works, right?
Looking ahead: new principles for better controllers
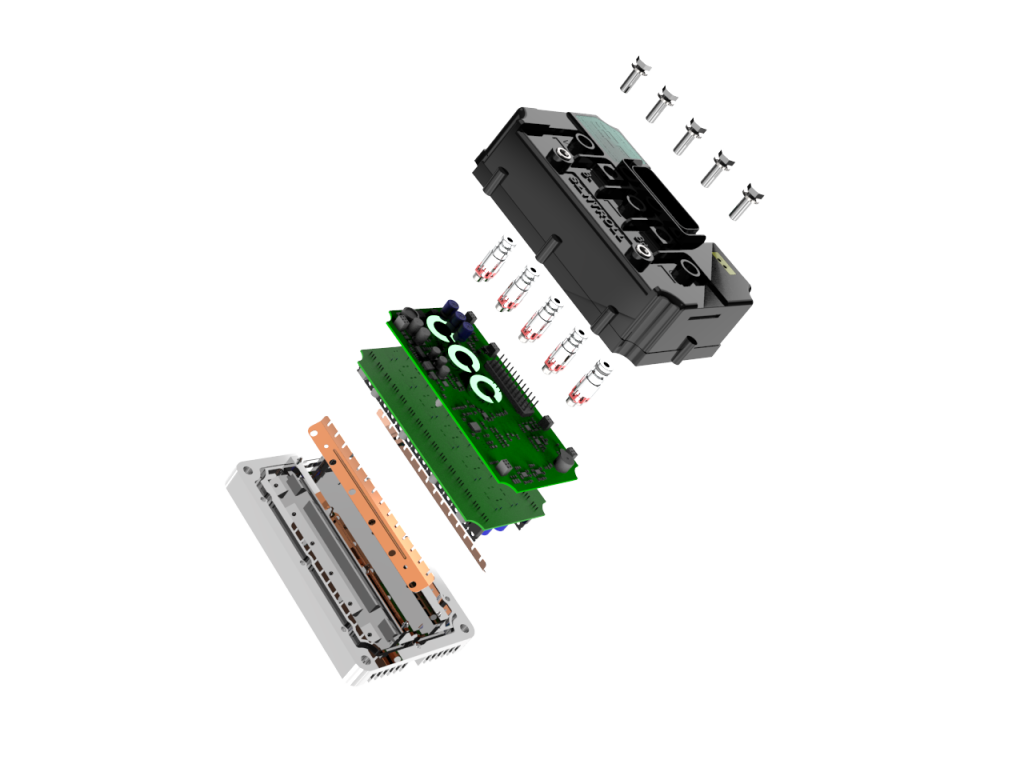
What I’m advocating is a shift from band-aid fixes to design principles that survive messy reality. For example, modular control architecture, robust observer designs that handle noisy inputs, and adaptive PWM strategies reduce sensitivity to sensor drift. These ideas matter when you pick a bldc motor controller — and yes, the right hardware must be paired with thoughtful firmware. I recommend you test with worst-case scenarios early, not as an afterthought.
What’s Next?
Moving forward, teams should focus on measurable criteria. First, test for resilience: how does the system behave with intermittent sensor loss or voltage sag? Second, evaluate maintainability: can firmware patches be deployed safely without full system downtime? Third, assess real-world efficiency, not just peak lab numbers. These three metrics give you a pragmatic shortlist for choosing solutions that last. And — funny how small tests reveal big problems.
To wrap up, I’ve learned that honest testing, paired with adaptive control thinking, beats expensive component swaps most of the time. We should aim for solutions that handle messy inputs, not just shine in calm labs. If you want practical parts and support that match this approach, check out Santroll. I’m confident this kind of thinking saves time, money, and a lot of headaches.